Boost
C++ Libraries
Boost
C++ Libraries
...one of the most highly
regarded and expertly designed C++ library projects in the
world.
— Herb Sutter and Andrei
Alexandrescu, C++
Coding Standards
Boost
C++ Libraries
...one of the most highly
regarded and expertly designed C++ library projects in the
world.
— Herb Sutter and Andrei
Alexandrescu, C++
Coding Standards




R-tree has 5 parameters but only 2 are required:
rtree<Value, Parameters, IndexableGetter = index::indexable<Value>, EqualTo = index::equal_to<Value>, Allocator = std::allocator<Value> >
Value - type of object which will be stored in the container,
Parameters - parameters
type, inserting/splitting algorithm,
IndexableGetter - function
object translating Value to Indexable (Point
or Box) which R-tree can handle,
EqualTo - function object
comparing Values,
Allocator - Values allocator, all allocators needed
by the container are created from it.
R-tree may store Values of any type as long as passed function
objects know how to interpret those Values, that is extract
an Indexable that the R-tree can handle and compare Values.
The Indexable is a type adapted to Point, Box or Segment concept.
The examples of rtrees storing Values translatable to various
Indexables are presented below.
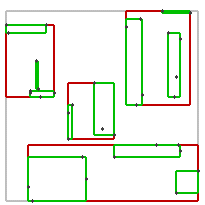
|
rtree<Point, ...> |
rtree<Box, ...> |
rtree<Segment, ...> |
|---|---|---|
|
|
|
|
By default function objects index::indexable<Value> and index::equal_to<Value> are defined for some typically used
Value types which may be stored without defining any additional
classes. By default the rtree may store pure Indexables, pairs
and tuples. In the case of those two collection types, the Indexable
must be the first stored type.
Indexable = Point |
Box | Segment
Value = Indexable
| std::pair<Indexable,
T>
| boost::tuple<Indexable,
...> [
| std::tuple<Indexable,
...> ]
By default boost::tuple<...>
is supported on all compilers. If the compiler supports C++11 tuples and
variadic templates then std::tuple<...> may be used "out of the box"
as well.
Examples of default Value types:
geometry::model::point<...> geometry::model::point_xy<...> geometry::model::box<...> geometry::model::segment<...> std::pair<geometry::model::box<...>, unsigned> boost::tuple<geometry::model::point<...>, int, float>
The predefined index::indexable<Value>
returns const reference to the Indexable stored in the Value.
![[Important]](../../../../../../doc/src/images/important.png) |
Important |
|---|---|
The translation is done quite frequently inside the container - each time the rtree needs it. |
The predefined index::equal_to<Value>:
Point, Box and Segment
- compares Values with geometry::equals().
std::pair<...>
- compares both components of the Value. The first value
stored in the pair is compared before the second one. If the value stored
in the pair is a Geometry, geometry::equals() is used. For other types it uses operator==().
tuple<...>
- compares all components of the Value. If the component
is a Geometry, geometry::equals()
function is used. For other types it uses operator==().
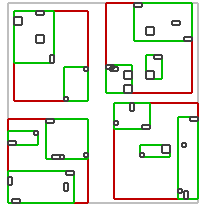
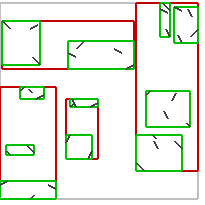
Values may be inserted to the R-tree in many various ways. Final
internal structure of the R-tree depends on algorithms used in the insertion
process and parameters. The most important is nodes' balancing algorithm.
Currently, three well-known types of R-trees may be created.
Linear - classic R-tree using balancing algorithm of linear complexity
index::rtree< Value, index::linear<16> > rt;
Quadratic - classic R-tree using balancing algorithm of quadratic complexity
index::rtree< Value, index::quadratic<16> > rt;
R*-tree - balancing algorithm minimizing nodes' overlap with forced reinsertions
index::rtree< Value, index::rstar<16> > rt;
Balancing algorithm parameters may be passed to the R-tree in run-time. To
use run-time versions of the R-tree one may pass parameters which names start
with dynamic_.
// linear index::rtree<Value, index::dynamic_linear> rt(index::dynamic_linear(16)); // quadratic index::rtree<Value, index::dynamic_quadratic> rt(index::dynamic_quadratic(16)); // rstar index::rtree<Value, index::dynamic_rstar> rt(index::dynamic_rstar(16));
The obvious drawback is a slightly slower R-tree.
Non-default R-tree parameters are described in the reference.
The R-tree is copyable and movable container. Move semantics is implemented using Boost.Move library so it's possible to move the container on a compilers without rvalue references support.
// default constructor index::rtree< Value, index::rstar<8> > rt1; // copy constructor index::rtree< Value, index::rstar<8> > rt2(r1); // copy assignment rt2 = r1; // move constructor index::rtree< Value, index::rstar<8> > rt3(boost::move(rt1)); // move assignment rt3 = boost::move(rt2); // swap rt3.swap(rt2);
The following code creates an R-tree using quadratic balancing algorithm.
using namespace boost::geometry; typedef std::pair<Box, int> Value; index::rtree< Value, index::quadratic<16> > rt;
To insert or remove a `Value' by method call one may use the following code.
Value v = std::make_pair(Box(...), 0); rt.insert(v); rt.remove(v);
To insert or remove a `Value' by function call one may use the following code.
Value v = std::make_pair(Box(...), 0); index::insert(rt, v); index::remove(rt, v);
Typically you will perform those operations in a loop in order to e.g. insert
some number of Values corresponding to geometrical objects (e.g.
Polygons) stored in another
container.
The R-tree allows creation, inserting and removing of Values from a range.
The range may be passed as [first, last) Iterators
pair or as a Range adapted to one of the Boost.Range Concepts.
namespace bgi = boost::geometry::index; typedef std::pair<Box, int> Value; typedef bgi::rtree< Value, bgi::linear<32> > RTree; std::vector<Value> values; /* vector filling code, here */ // create R-tree with default constructor and insert values with insert(Value const&) RTree rt1; BOOST_FOREACH(Value const& v, values) rt1.insert(v); // create R-tree with default constructor and insert values with insert(Iter, Iter) RTree rt2; rt2.insert(values.begin(), values.end()); // create R-tree with default constructor and insert values with insert(Range) RTree rt3; rt3.insert(values_range); // create R-tree with constructor taking Iterators RTree rt4(values.begin(), values.end()); // create R-tree with constructor taking Range RTree rt5(values_range); // remove values with remove(Value const&) BOOST_FOREACH(Value const& v, values) rt1.remove(v); // remove values with remove(Iter, Iter) rt2.remove(values.begin(), values.end()); // remove values with remove(Range) rt3.remove(values_range);
Furthermore, it's possible to pass a Range adapted by one of the Boost.Range adaptors into the rtree (more complete example can be found in the Examples section).
// create Rtree containing `std::pair<Box, int>` from a container of Boxes on the fly. RTree rt6(boxes | boost::adaptors::indexed() | boost::adaptors::transformed(pair_maker()));
There are functions like std::copy(), or R-tree's queries that copy values to
an output iterator. In order to insert values to a container in this kind
of function insert iterators may be used. Geometry.Index provide its own
bgi::insert_iterator<Container>
which is generated by bgi::inserter() function.
namespace bgi = boost::geometry::index; typedef std::pair<Box, int> Value; typedef bgi::rtree< Value, bgi::linear<32> > RTree; std::vector<Value> values; /* vector filling code, here */ // create R-tree and insert values from the vector RTree rt1; std::copy(values.begin(), values.end(), bgi::inserter(rt1)); // create R-tree and insert values returned by a query RTree rt2; rt1.spatial_query(Box(/*...*/), bgi::inserter(rt2));